高精密位移測(cè)量系統(tǒng)iXYZ發(fā)表時(shí)間:2022-12-01 14:45作者:購(gòu)儀器儀表網(wǎng)
高精密位移測(cè)量系統(tǒng)iXYZ簡(jiǎn)介 選購(gòu)精密位移定位產(chǎn)品的時(shí)候要根據(jù)具體的應(yīng)用考慮不同性能指標(biāo),應(yīng)用環(huán)境,調(diào)整頻繁度等諸多問(wèn)題正確理解各項(xiàng)技術(shù)指標(biāo)的物理意義,對(duì)最終組件的應(yīng)用系統(tǒng)至關(guān)重要,因此本文就常用的一些技術(shù)指標(biāo)和產(chǎn)品選型做一下簡(jiǎn)要介紹。 任何位移定位都基于笛卡爾直角坐標(biāo)系內(nèi)的任意剛體六個(gè)自由度的改變。 六個(gè)自由度∶三個(gè)分別沿著x、y、z軸方向的平移自由度,三個(gè)圍繞x、y、z軸的旋轉(zhuǎn)自由度。 對(duì)于單軸位移機(jī)構(gòu),理想的狀態(tài)就是她只沿著我們要求的運(yùn)動(dòng)方向單一運(yùn)動(dòng),其他自由度上沒(méi)有移動(dòng)量,但是實(shí)際上是做不到的,所以我們除了要控制好運(yùn)動(dòng)方向這個(gè)自由度之外,還學(xué)要約束或者調(diào)整其他五個(gè)方面的自由度運(yùn)動(dòng)。對(duì)于多軸組合運(yùn)動(dòng),如何減小聯(lián)動(dòng)現(xiàn)象,避免干涉位移是系統(tǒng)組合考慮的**問(wèn)題。 當(dāng)選擇一款專業(yè)的位移臺(tái)時(shí),需要考慮很多不同評(píng)定位移臺(tái)性能的指標(biāo)。了解各種各樣參數(shù)的定義以及他們?nèi)绾斡绊戇\(yùn)動(dòng)結(jié)果將簡(jiǎn)化產(chǎn)品的選擇過(guò)程。 下面是高精密位移測(cè)量系統(tǒng)iXYZ的常見(jiàn)技術(shù)指標(biāo)。 1.分辨率(Resolution) 分辨率是指移動(dòng)系統(tǒng)可以分辨的最小位置增量,它不同于系統(tǒng)的最小控制增量。往往是理論值,分辨率同樣涉及到顯示器和數(shù)據(jù)采集器的分辨率,通常取決于編碼器的輸出,但由于滯后、背隙等導(dǎo)致傳動(dòng)系統(tǒng)的降低,因而大多系統(tǒng)的最小移動(dòng)增量都不等于分辨率,除非編碼器直接測(cè)量傳動(dòng)。例如針對(duì)電控位移臺(tái)而言,分辨率為步進(jìn)電機(jī)每轉(zhuǎn)動(dòng)最小的一步,電控平移臺(tái)的理論運(yùn)動(dòng)輸出量。 2.誤差(Error,Deviation) 誤差是指實(shí)測(cè)的品質(zhì)參數(shù)和理想的/需要的結(jié)果之間的差值。誤差主要有兩方面∶軸向誤差,如重復(fù)定位精度,與沿著運(yùn)動(dòng)方向的參數(shù)有關(guān);非軸向誤差,與傾斜,與約束的自由度方向相關(guān)。 3. 靈敏度(Sensitivity) 能產(chǎn)生一個(gè)輸出運(yùn)動(dòng)的最小輸入,通常用來(lái)表征手動(dòng)位移臺(tái),也可以定義為輸入驅(qū)動(dòng)和輸出運(yùn)動(dòng)的比值,這個(gè)術(shù)語(yǔ)經(jīng)常和分辨率混淆。 4.最小位移增量(incremental) 手動(dòng)或者電動(dòng)可以真實(shí)輸出的最小移動(dòng)數(shù)值,手動(dòng)與操作人員的技能有很大關(guān)系,電控位移臺(tái)是整體綜合性能體現(xiàn)。 5. 精度(Accuracy) 精度往往被誤解為最小移動(dòng)增量,但是實(shí)際精度的定義很籠統(tǒng),有很多種定義對(duì)于一個(gè)給定的輸入,實(shí)際位置和理想位置之間的**差距。運(yùn)動(dòng)系統(tǒng)的精度跟實(shí)際位置的測(cè)量方式有很大的關(guān)系,所以對(duì)于開(kāi)環(huán)設(shè)備中精度并不是一個(gè)很有意義的參數(shù)。 6. 絕對(duì)精度Absolute Accuracy 絕對(duì)精度是指系統(tǒng)針對(duì)命令輸入或理想輸入的輸出,更直觀的說(shuō)應(yīng)該叫不確定度。當(dāng)要求一個(gè)運(yùn)動(dòng)系統(tǒng)精確運(yùn)動(dòng)10mm,而實(shí)際上只運(yùn)動(dòng)了9.99mm,則不確定度是0.01mm。 7. 重復(fù)定位精度(Repeatability) 重復(fù)定位精度是指移動(dòng)系統(tǒng)多次可到達(dá)一個(gè)既定點(diǎn)的能力。通常所說(shuō)的重復(fù)定位精度指的是單向重復(fù)定位精度,這個(gè)參數(shù)避開(kāi)了系統(tǒng)的空回和滯后,避免數(shù)據(jù)統(tǒng)計(jì)混亂,單向重復(fù)定位精度是指運(yùn)動(dòng)系統(tǒng)僅在一個(gè)方向上做重復(fù)增量運(yùn)動(dòng),確定參考點(diǎn)后不小于5次移動(dòng)到參考點(diǎn),記錄其誤差**值。因此一個(gè)更重要的定義是雙向重復(fù)定位精度,既無(wú)論運(yùn)動(dòng)方向多次嘗試達(dá)到一個(gè)嚴(yán)格意義點(diǎn)的能力。 8. 空回(Backlash) 空回是指不至引起反向可測(cè)量輸出的**輸出量。軸向預(yù)緊不夠或傳動(dòng)鏈元件的嚙合不好會(huì)導(dǎo)致空回,例如嚙合齒輪上的齒不好。空回是相對(duì)穩(wěn)定的并且可以用好的控制器補(bǔ)償。 9. 偏心和擺動(dòng) Eccentricity and Wobble 偏心有時(shí)也稱同心度,旋臺(tái)的偏心的是指當(dāng)旋臺(tái)旋轉(zhuǎn)時(shí)它的旋轉(zhuǎn)中心與平均位置的偏差。如果一個(gè)旋臺(tái)是絕對(duì)同心的,那么在旋轉(zhuǎn)時(shí)就沒(méi)有偏心。對(duì)于選臺(tái),擺動(dòng)是旋轉(zhuǎn)軸的角度偏差。 10. 跳動(dòng)Runout 跳動(dòng)是指非軸向線性誤差。這是位移臺(tái)的理想直線運(yùn)動(dòng)和實(shí)測(cè)直線運(yùn)動(dòng)之間的偏差。跳動(dòng)有兩個(gè)正交分量∶表征水平方向偏差的直線度和表征垂直方向偏差的平面度。 11. 傾斜和晃動(dòng)Tilt and Wobble 傾斜和晃動(dòng)是指非軸向角度誤差。它是指理想的運(yùn)動(dòng)直線和實(shí)測(cè)的運(yùn)動(dòng)臺(tái)之間的偏移量。傾斜和晃動(dòng)有三個(gè)相互垂直的分量,一般指的是轉(zhuǎn)動(dòng)、俯仰和偏擺。這三個(gè)分量決定了由幾何形狀引起的所有運(yùn)動(dòng)系統(tǒng)誤差。 12. 負(fù)載能力Load Capacity 對(duì)于位移臺(tái)來(lái)說(shuō),負(fù)載能力是指所允許的作用于位移臺(tái)臺(tái)面中心且與運(yùn)動(dòng)方向和工作臺(tái)面垂直的合力大小。對(duì)于旋轉(zhuǎn)臺(tái)來(lái)說(shuō),合力的方向是沿著旋轉(zhuǎn)軸的。若負(fù)載不在工作臺(tái)的中心,則負(fù)載需適當(dāng)減少。 高精密位移測(cè)量系統(tǒng)iXYZ產(chǎn)品舉例說(shuō)明∶ 電控位移臺(tái)簡(jiǎn)稱電移臺(tái),因其精度高、速度快、承載大、行程長(zhǎng)、自動(dòng)化高而被廣泛應(yīng)用于科研、激光應(yīng)用、全自動(dòng)計(jì)量檢驗(yàn),工業(yè)自動(dòng)化等領(lǐng)域,并且可以實(shí)現(xiàn)在真空、污染、無(wú)菌、輻射等環(huán)境下的自動(dòng)位移控制。 電控位移系統(tǒng)由三部分組成∶位移臺(tái)、驅(qū)動(dòng)電機(jī)和控制器。位移臺(tái)是系統(tǒng)的心臟,它決定了位移精度、行程、承載、穩(wěn)定性、適用環(huán)境及外形尺寸等主要技術(shù)指標(biāo)。驅(qū)動(dòng)電機(jī)及控制器主要決定驅(qū)動(dòng)扭矩、分辨率、加減速度、信號(hào)處理、使用功能(如掃面、圓弧插補(bǔ))等性能參數(shù)。 一、電控平移臺(tái) 1、對(duì)電控平移臺(tái)運(yùn)動(dòng)平穩(wěn)性和承載大小影響**的是導(dǎo)軌的選擇。目前常用的導(dǎo)軌形式主要有燕尾導(dǎo)軌、交叉滾珠導(dǎo)軌、線性軸承導(dǎo)軌、線性滑軌。 各種導(dǎo)軌的主要特征和性能見(jiàn)下表∶ 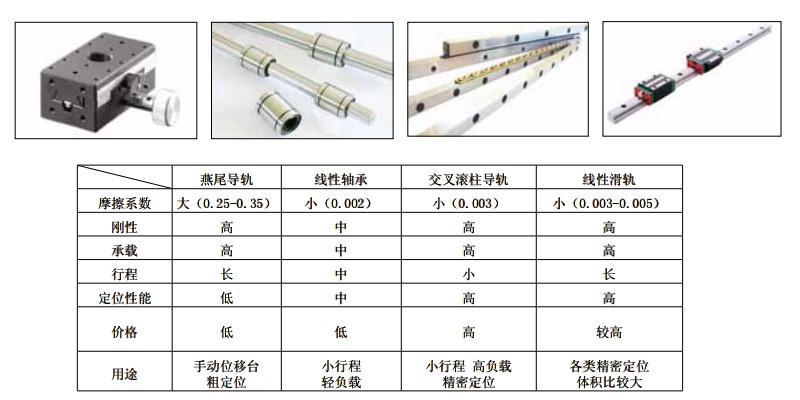 2、傳動(dòng)螺桿品質(zhì)對(duì)定位精度、軸向間隙、速度和分辨率的影響**,目前常用的絲桿形式主要有滾珠絲桿、研磨絲桿、梯形絲桿。 2、傳動(dòng)螺桿品質(zhì)對(duì)定位精度、軸向間隙、速度和分辨率的影響**,目前常用的絲桿形式主要有滾珠絲桿、研磨絲桿、梯形絲桿。滾珠絲桿與螺母之間通過(guò)鋼珠形成滾動(dòng)摩擦,運(yùn)動(dòng)平穩(wěn),容易實(shí)現(xiàn)高速運(yùn)行,并且可以通過(guò)改變鋼珠直徑或采用雙螺母有效解決軸向間隙,但小導(dǎo)程制作困難,不利于提高分辨率研磨絲桿與螺母為滑動(dòng)摩擦,效率低,速度慢,但小導(dǎo)程可帶來(lái)高分辨率。梯形螺桿常常應(yīng)用于減速升降臺(tái),特色是有自鎖功能. 各種絲桿的主要特征和性能見(jiàn)下表∶ 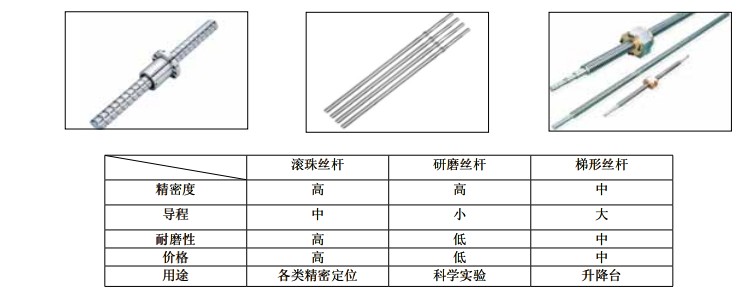 3、機(jī)體材質(zhì)和加工質(zhì)量對(duì)平移臺(tái)的整體精度和抗環(huán)境影響能力解決定作用。 3、機(jī)體材質(zhì)和加工質(zhì)量對(duì)平移臺(tái)的整體精度和抗環(huán)境影響能力解決定作用。不銹鋼和鋁合金兩種材料的比較∶ (1)溫度影響 材料受溫度影響會(huì)引起尺寸的變化,用公式表示為∶△L=qL△T,其中 a 為溫度膨脹系數(shù)。不銹鋼的熱膨脹系數(shù)是鋁的一半,因此在溫度微量變化的場(chǎng)合,不銹鋼機(jī)體能保證高穩(wěn)定性。但是我們使用電位移臺(tái)時(shí)的環(huán)境溫度一般都不是恒定的,變化較大,特別是電移臺(tái)旁邊放置有熱源如半導(dǎo)體激光器等,這時(shí)的穩(wěn)定性考量則是另一種情況∶材料變形量△L與材料的溫度膨脹系數(shù) α 除以溫度傳導(dǎo)系數(shù)c 的商(a/c)的正比。鋁材的溫度傳導(dǎo)系數(shù)c是不銹鋼的將近十倍,因此鋁材機(jī)體的變形量比不銹鋼小的多。 (2)抗振性 材料受到外力時(shí)會(huì)發(fā)生變形,用公式表示為∶F=kx,其中F是外力,x是變形,k是彈性模量。不銹鋼的彈性模量k是鋁材的三倍,因此穩(wěn)定性比鋁優(yōu)越。可是在考量抗震性同時(shí),還要考慮材料的密度p,當(dāng)k/p值越大,抗震性能就學(xué)好。不銹鋼的密度是鋁材的三倍,因此抗震性略低于鋁材。 所以位移臺(tái)的臺(tái)面底板多采用航空硬鋁,導(dǎo)軌絲桿大多為軸承鋼,連接部件大多采用不銹鋼材質(zhì)。 4、電控平移臺(tái)的裝調(diào)檢測(cè)是產(chǎn)品品質(zhì)保障的核心;導(dǎo)軌的固定方法、絲杠的間隙消除、電機(jī)與聯(lián)軸器和絲桿的連接同軸性,軸承座與臺(tái)面的平行固定方法等等都是電控平移臺(tái)的裝調(diào)核心工藝技術(shù)。良好的測(cè)量工具設(shè)備,完善的檢測(cè)制度是產(chǎn)品質(zhì)量的關(guān)鍵問(wèn)題。 我司生產(chǎn)的電控平移臺(tái)均精選優(yōu)質(zhì)零部件,設(shè)計(jì)新穎獨(dú)特,具有多種結(jié)構(gòu)形式,各種精度,不同行程,多種承載和各種外形尺寸供廣大客戶選用。產(chǎn)品適配步進(jìn)電機(jī)或伺服電機(jī)(標(biāo)準(zhǔn)品配有步進(jìn)電機(jī));可配裝光柵尺進(jìn)行閉環(huán)控制,提高精度可加裝防塵罩,適合多種環(huán)境可根據(jù)客戶需要定制各種產(chǎn)品。本著用戶**的原則,我們不斷的研發(fā)出更多更好的產(chǎn)品,為用戶提供更多的選擇。 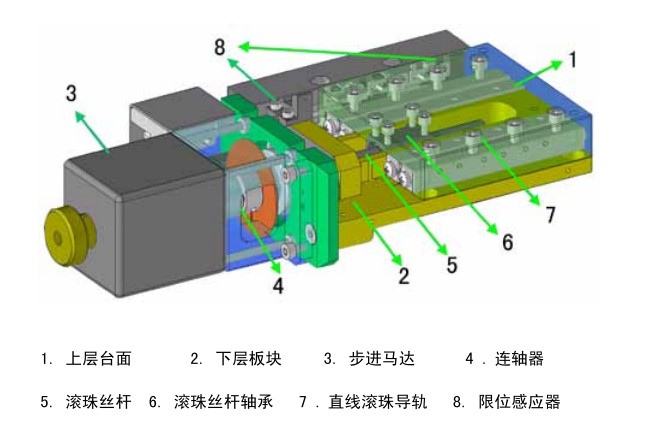 聲明:此篇為蘇州閩泰瑞澤電子科技有限公司原創(chuàng)文章,轉(zhuǎn)載請(qǐng)標(biāo)明出處鏈接:http://www.aolekang.net/h-nd-574.html
|
